
Abstract
We fabricated actuators consisting of an ionic liquid gel electrolyte layer sandwiched between two nanofiber mat electrodes and studied the relationship between the polymer type of the nanofiber mat and the performance of the actuator. We selected poly(urethane) (PU), poly(methyl methacrylate), and poly(vinylidene fluoride-co-hexafluoropropylene) (PVDF-HFP) as the materials for the nanofiber mat electrodes. The PU nanofiber mat actuator exhibited the largest deformation, whereas the PVDF-HFP mat actuator exhibited the smallest deformation. The performance of the actuator was determined on the basis of cyclic voltammetry and alternating current impedance measurements.
Similar content being viewed by others


Introduction
Many polymer actuators that consist of an electrolyte sandwiched between two electrodes have been studied to produce flexible motions for soft robotics [1, 2]. A gel containing an ionic liquid (IL) has often been used as the electrolyte because of its non-volatility and high ionic conductivity. To obtain actuators that exhibit high performance, it is important to use ILs in which the ionic volumes of cations and anions are very different. This is because the actuator functions when the cations and anions are transferred by the applied voltage [3]; because of the large difference between the size of cations and anions, the volumes of the cathode and anode are also different, causing a bending motion of the actuator. Moreover, actuators can bend faster and to a greater degree as the conductivity and specific surface area of the electrodes increase because these two effects improve the capacitance of the actuator, thereby increasing the number of ions surrounding them [3].
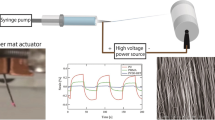
Although there are many film-like actuators, we prepared a fabric-like actuator in the present study. In a previous paper, we reported an actuator made from nanofiber mats and an ion gel [4]. The nanofiber mat was prepared by an electrospinning method. In this actuator, a nanofiber mat was coated with poly(3,4-ethylenedioxythiophene) (PEDOT), and an ion gel was sandwiched by two PEDOT-coated nanofiber mats. Unlike other actuators in which fibrous materials are used as the electrode materials [5, 6], this nanofiber mat actuator exhibited anisotropic performance when the direction of the nanofibers was oriented in the bending direction. Thus, the controllability of the fiber direction is the characteristic feature of electrospinning. In the electrospinning method, a high voltage is applied between a spinning nozzle and a collector. The spinning solution ejected from the nozzle is drawn by electrostatic force, and the resultant spun fibers accumulate on the collector. There are some studies in which electrospun nanofibers were used for their actuators. Sakamoto et al. [7] reported an actuator made of an electrospun nanofiber; however, the driving mechanism of their actuator was not attributed to ionic motion. Moreover, their actuator consisted of a single nanofiber, differing from our nanofiber “mat” actuator. Kim and Kee [8] and Wang et al. [9] also reported an actuator made with a nanofiber mat; however, their actuators did not use nanofiber mats as the electrode layers, like ours, but as an electrolyte layer.
In our previous study, we did not analyze either the influence of the polymer type or the electrochemical properties of the actuator. In the present study, we investigated the dependency of the polymer type on the nanofiber mat electrode and the performance of the resulting actuator. Moreover, we determined the electrochemical properties of the obtained nanofiber mat actuators by using cyclic voltammetry (CV) and alternating current (AC) impedance measurements. As a first step, we used randomly oriented nanofiber mats as the actuators.
Experimental section
Materials
Poly(methyl methacrylate) (PMMA) (Mw = 8000 g/mol) and poly(vinylidene fluoride-co-hexafluoropropylene) (PVDF-HFP) (Mw = 400,000 g/mol) were purchased from Nakalai Tesque Inc. and Sigma-Aldrich Co. LLC, respectively. We used poly(urethane) (PU) as the polyether (Elastollan, 1190A, BASF). We used Pluronic L-34 (Adeka Corporation) as a surfactant. Dimethyl sulfoxide (DMSO) was obtained from Wako Pure Chemical Industries Ltd, and was used as received. Dicumyl peroxide (DCP), which was used as a cross-linking agent for PVDF-HFP, and a 1.3 wt% PEDOT:PSS (polystyrene sulfonate) aqueous dispersion were purchased from Sigma-Aldrich Co. LLC. We used 1-ethyl-3-methylimidazolium bis(trifluoromethanesulfonyl)amide (Tokyo Chemical Industry Co., Ltd) as an IL.
Preparation of nanofiber mat electrodes
PU was dissolved in a mixture of acetone and dimethylformamide (DMF) (w:w = 1:1). PVDF-HFP was dissolved with DMF, and then DCP was added to the PVDF-HFP solution. PMMA was dissolved in DMF. The solution concentrations were 10 wt% for PU and PMMA and 27 wt% for PVDF-HFP. The DCP concentration was 1.5 wt% against the PVDF-HFP weight.
The three types of spinning solutions obtained were then spun by electrospinning under the following conditions: applied voltage, 20 kV; spinning rate, 0.01 mL/min; and volume of the spun solution, 1.0 mL. The nozzle-to-collector distance was varied among the samples (15 cm for PU and 20 cm for the others) to adjust the thickness of the resulting nanofiber mat. A stainless plate covered with parchment paper was used as the collector.
Next, we added conductivity to the prepared nanofiber mats. The nanofiber mat was immersed in a PEDOT:PSS aqueous dispersion, which contained DMSO and the surfactant, for 1 min under ultrasonic vibration. The concentrations of DMSO and the surfactant in the PEDOT:PSS dispersion were 5 and 1 wt%, respectively, and the mixed solution was prepared by stirring for 30 min. After 1 min of immersion, the nanofiber mats were completely dried. A PEDOT:PSS coating method was used as described elsewhere [10].
Preparation of the actuators
The preparation method for the actuators is illustrated in Fig. 1. First, a 17 wt% PVDF-HFP IL solution was painted on the two nanofiber mats. Then, both mats were immediately attached to each other with the sides of the IL solution inward before they became a gel. The actuator that was obtained was completely dried and cut to a 5 × 15 mm2 size. The thicknesses of the actuators were 0.143 mm for PU, 0.153 mm for PMMA, and 0.155 mm for PVDF-HFP.

Schematic illustration of the preparation method for the nanofiber mat actuator
Characterization
Scanning electron microscope (SEM) observations were performed using a Keyence SEM (VE-9800, Keyence Co., Ltd, Osaka, Japan). The fiber samples were gold sputter coated with an ion coater (SC-701, Sanyu Electron Co., Ltd, Tokyo, Japan). The average and standard deviations of the fiber diameters were determined from 50 measurements using the Photo Ruler software.
The specific surface area was measured by using an automatic-specific surface area analyzer (Belsorp Mini II, BEL Japan Inc., Osaka, Japan) using N2.
The electrical conductivity of the nanofiber mat electrode was measured using a four-point probe resistivity meter (Lorester-AX MCP-T370, Mitsubishi Chemical Analytech Co., Ltd, Kanagawa, Japan).
Displacement measurements
Displacements of the actuators were measured at room temperature under rectangular waveform voltage (±1.5V) by using a laser displacement meter (LK-G85, Keyence Co., Ltd, Osaka, Japan). The frequency of the applied voltage was varied from 0.014 to 0.15 Hz. The detailed measurement setup is shown in Fig. S1. The induced strain was evaluated by the following equation:
where d is the thickness of the actuator and L is the free length. Parameter δ denotes the measured displacement [5].
Electrochemical measurements
For CV measurements, we cut the actuators into square specimens of 5 × 5 mm2. The specimens were sandwiched between a pair of gold plates that had the same area as the specimen. The measurements were performed in the potential range of ±1.5 V at a scan rate of 100 mV/s by using an electrochemical analyzer (Model 1205C, ALH/CH Instruments) at room temperature. The capacitance (C) was calculated from the CV results via the following equation:
where I+ and I− are the currents in A at 0 V in the two scanning directions, and dV/dt is the potential scan rate (V/s) [11].
We also performed AC impedance measurements to obtain the ionic conductivities of the same sample specimens. The measurements were performed in the frequency range from 10−3 to 106 Hz, by using an electrochemical analyzer (Model 660E, ALS/HCH Instruments) at room temperature. The AC voltage was 10 mV, and the amplitude was 5 mV. The ionic conductivity (σ) was calculated from the impedance measurements via the following equation:
where A is the contact area between the electrolyte and the electrode (5 × 5 mm2). The electrolyte bulk resistance (Rb) was determined by the intercept of the semicircle with the real axis. Of note, we used the actuator thickness as the l value because the electrolyte gel soaked into the nanofiber mat electrodes.
Results and discussion
Dependency of polymer type
Figure 2 shows the SEM images of the nanofiber mats before (top) and after (bottom) coating with PEDOT:PSS containing DMSO and the surfactant. Compared with those coated without the surfactant (Fig. S2), a sufficient coating could be obtained by adding the surfactant into the PEDOT:PSS dispersion. Table S1 shows the effect of the addition of the surfactant and DMSO to the PEDOT:PSS dispersion on the conductivity. As shown in the table, the addition of both DMSO and the surfactant improved the conductivity of the nanofiber mat. Therefore, we used the PEDOT:PSS dispersion containing both components. DMSO acts as a secondary dopant and improves the conductivity of PEDOT:PSS [12]. Moreover, the surfactant applied in this study is a poly(ethylene oxide)/poly(propylene oxide) copolymer. Considering that the addition of PEG to PEDOT:PSS enhanced the conductivity by increasing the carrier concentration [13], this surfactant may have also improved the conductivity of PEDOT:PSS and enhanced the wettability of PEDOT:PSS to the nanofiber mats.

SEM images of the various nanofiber mats before (top) and after (bottom) PEDOT:PSS coating. a, d PU, b, e PMMA, and c, f PVDF-HFP
The conductivities and specific surface areas of the obtained nanofiber mats are summarized in Table 1. The PU nanofiber mat exhibited the highest conductivity, whereas the PVDF-HFP nanofiber mat exhibited the lowest. This is because PVDF-HFP repels the PEDOT:PSS aqueous dispersion due to its hydrophobicity. Regarding the specific surface area after PEDOT:PSS coating, the PVDF-HFP and PU nanofiber mats exhibited similar values, whereas the PMMA mat exhibited a somewhat smaller value. This is because of the fiber diameter: the average fiber diameters of the PU, PMMA, and PVDF-HFP nanofibers after PEDOT:PSS coating were 0.425 ± 0.087, 1.35 ± 0.18, and 0.501 ± 0.130 μm, respectively (Table 1). Therefore, the nanofiber mats that had similar diameters (PVDF-HFP and PU) exhibited a larger specific surface area than the PMMA mat.
Next, we prepared actuators using the above-mentioned nanofiber mats as electrodes. Figure 3 shows (a) the time dependencies of the generated strain when voltage was applied at a 0.014 Hz frequency and (b) the frequency dependency on the strain amplitude for the three actuator specimens. The strain amplitude is defined as half the value of the average differences between the maximum and minimum of the strains in panel (a). As shown in Fig. 3a, b, the PU nanofiber mat actuator had the largest deformation, whereas the PVDF-HFP mat actuator had the smallest deformation for all frequencies. Regarding the specific surface area and conductivity of the nanofiber mat electrodes (Table 2), the conductivity of the nanofiber mat affected the generated strain of the actuator. Moreover, the poor adhesion property of the PVDF-HFP nanofiber mat electrodes to the electrolyte layer should lead to the smallest generated strain. In the case of the PMMA nanofiber mat actuator, the generated strain was smaller than that of PU. This result can be attributed to the following three factors: (1) the electrode layer of PMMA easily causes interlayer peeling; (2) the PMMA fiber diameter is larger than that of PU, resulting in a higher bending rigidity; and (3) the PMMA nanofiber mat electrodes have lower conductivity. Considering the second factor, we also prepared two PMMA nanofiber mat actuators in which thinner fibers were used (the PMMA spinning concentrations were 7.5 and 5 wt%, respectively). However, the performance of the 7.5 wt% PMMA nanofiber mat was worse than that of the 10 wt% nanofiber mat (Fig. 3), and the 5 wt% mat was too brittle to produce an actuator. Therefore, we conjecture that the first and third factors are the major causes.

a Variation of the generated strain of the three actuators as a function of time. The applied voltage was periodically switched at a 0.014 Hz frequency to ±1.5 V. b The strain amplitudes variation against the frequency of the applied voltage
The generated strain of the PU nanofiber mat actuator was over 10 times larger than that reported in our previous paper [4], where a nanofiber mat actuator was first reported. In our previous paper, we used a PVDF-HFP nanofiber mat as the electrode, and the conductivity was added by directly polymerizing PEDOT on the nanofibers. The highest conductivity of the previously reported nanofiber mat electrode was 10 S/cm, where the nanofiber structure was almost buried by PEDOT, resulting in a decrease in the specific surface area. However, compared with a previous study [14] in which PU-IL gel was sandwiched between PEDOT:PSS electrodes, the generated strain at 1.5 V was higher (approximately 0.3%) than that obtained in this study, although the IL content in our case was much larger. Taking into account that the thickness of our actuator was greater than that reported in the previous work by approximately 20 μm [11], the difference in the flexibility of these actuators could be one of the reasons for the different generated strain, which we will discuss in the next section.
CV measurements
To confirm the above results, we performed CV measurements on the actuators. Figure 4 shows the CV loops for the three actuators. The PVDF-HFP nanofiber mat actuator exhibited a narrow CV loop, whereas the PU and PMMA nanofiber mat actuators exhibited much wider CV loops, indicating that the latter two actuators had larger capacitances. We evaluated the capacitance (C) of all actuators from the CV results using Eq. 2 and summarized them in Table 2. Some papers have reported that the amplitudes of C values are consistent with the generated strain of the actuators [3, 11]; however, in the case of PU nanofiber mat actuators, they were smaller than that of PMMA, as observed in this study. Considering that the PU nanofiber mat actuator showed a higher current response than that of PMMA and PVDF-HFP (Fig. 4), the ions in the PU actuator seemed to move faster than in other actuators, resulting in a larger and faster deformation (Fig. 3a, b). However, as shown later in Fig. 5, this discussion is insufficient to explain the deformation mechanism.

Cyclic voltammograms of the three nanofiber mat actuators measured at various voltages

Impedance plots of the three nanofiber mat actuators. a Overall experimental data, b low resistance region of a
The C values of our actuators are lower than those of other actuators that have a similar structure [14]. Okuzaki et al. [14], who studied IL/PU/PEDOT:PSS composite actuators, reported CV results that showed a rectangular loop, indicating an ideal electric double-layer capacitor. Taking into account that resistance changes the loop shape to oblique and narrow in general [11], our nanofiber mat actuators exhibit a large resistance. This may be caused (1) by the interface between the nanofiber mat electrodes and the IL gel electrolyte and (2) by the low conductivity of the electrodes.
In the CV curve of the PMMA nanofiber mat actuator, a small peak is present at approximately 1.0 V, indicating that an oxidation reaction occurred. Because the CV loop of the PMMA mat was not symmetrically shaped, it implies that decomposition of the materials occurred because of the reaction, which changed the electrochemical properties, such as the conductivity of the PMMA actuator, resulting in different initial and final currents of the CV at −1.5 V.
We also performed AC impedance measurements to evaluate the ionic conductivities of the actuator samples. Fig. 5 shows the impedance plots for actuator specimens sandwiched between gold plates. Panel (a) shows the overall experimental data, and panel (b) shows the data for the low resistance region of panel (a). As shown in Fig. 5a, the PVDF-HFP nanofiber mat actuator had a much larger resistance than the others. In Fig. 5b, semicircles are observed in the plots for the PU and PMMA nanofiber mat actuators. We concluded that the semicircles observed in panel (b) can be attributed to the Rb values. We evaluated the ionic conductivities of the electrolytes for the PU and PMMA nanofiber mat actuators using Eq. 3. The ionic conductivity of the PU nanofiber mat actuator was 0.17 mS/cm, which is comparable to a previous report [14]. For the PMMA nanofiber mat actuator, the ionic conductivity was 0.16 mS/cm. However, because the PVDF-HFP nanofiber mat actuator did not show the semicircle in the measurement range (Fig. 5a, b), we conjectured that the Rb value is much higher for the PVDF-HFP nanofiber mat actuator compared with the other two. Considering the fact that the ionic conductivities of the PU and PMMA nanofiber mat actuators were similar, we conjectured that the lower current observed in the CV plot of the PMMA nanofiber mat actuator may be due to the higher interfacial resistance between the electrolyte and the electrode.
Conclusion
We studied the effect of polymer type on the performances of actuators consisting of two nanofiber mat electrodes and an IL gel electrolyte layer. The conductivity of the nanofiber mat improved when a surfactant and DMSO were added to the PEDOT:PSS aqueous dispersion. The PU nanofiber mat actuator showed the largest deformation among the three nanofiber mat actuators studied. The CV measurements revealed that the capacitance of the PU nanofiber mat actuator was not greater than that of PMMA; however, the current reached the highest value of ±1.5 V. This large current value indicates that the ions in the PU actuator could move faster than those in the other actuators, resulting in larger and faster deformation. We are now attempting to develop a textile actuator, which is an advanced form of the nanofiber mat actuator reported in this paper. We will report the practical application of these actuators in the near future.
Change history
25 March 2019
In the original published version of Table 1 and Table S1, the conductivity values are incorrect. The corrected Tables are as shown below.
References
Asaka K, Mukai K, Sugino T, Kiyohara K. Ionic electroactive polymer actuators based on nano-carbon electrodes. Polym Int. 2013;62:1263–70.
Kim O, Kim SJ, Park MJ. Low-voltage-driven soft actuators. Chem Commun. 2018;54:4895–904.
Imaizumi S, Kokubo H, Watanabe M. Driving mechanism of ionic polymer actuators having electric double layer capacitor structures. J Phys Chem B. 2012;116:5080–9.
Asai H, Kawai T, Shimada N, Sakai T, Nakane K. Effect of spinning condition and fiber alignment on performance of ionic polymer gel actuators with nanofiber mat electrodes. Sens Actuators B. 2015;214:76–81.
Terasawa N, Asaka K. Performance enhancement of PEDOT:poly(4-styrenesulfonate) actuators by using ethylene glycol. RSC Adv. 2018;8:17732–8.
Sugino T, Kiyohara K, Takeuchi I, Mukai K, Asaka K. Actuator properties of the complexes composed by carbon nanotube and ionic liquid: the effects of additives. Sens Actuators B. 2009;141:179–86.
Sakamoto H, Amaya S, Sunahase Y, Suye S. Fabrication and characterization of Fe/polyurethane nanofiber actuator prepared by electrospinning. J. Fiber Sci Technol. 2017;73:135–8.
Kim SS, Kee CD. Electro-active polymer actuator based on PVDF with bacterial cellulose nano-whiskers (BCNW) via electrospinning method. Int. J Precis Eng Man. 2014;15:315–21.
Wang F, Ko SY, Park JO, Park SH, Kee CD. Electroactive polymer actuator based on PVDF and graphene through electrospinning. Adv Mater Res. 2015;1105:311–4.
Nagata R, Yanagi Y, Fujii S, Kataura H, Nishioka Y. Highly conductive DMSO-treated PEDOT:PSS electrodes applied to flexible organic solar cells. IEICE Trans Electron. 2015;E98.C:411–21.
Safari M, Naji L, Baker RT, Taromi FA. The enhancement effect of lithium ions on actuation performance of ionic liquid-based IPMC soft actuators. Polymer (Guildf). 2015;76:140–9.
Kim JY, Jung JH, Joo LJ. Enhancement of electrical conductivity of poly(3,4-ethylenedioxythiophene)/poly(4-styrenesulfonate) by a change of solvents. Synth Met. 2002;126:311–6.
Mengistie DA, Wang PC, Chu CW. Effect of molecular weight of additives on the conductivity of PEDOT:PSS and efficiency for ITO-free organic solar cells. J Mater Chem A. 2013;1:9907–15.
Okuzaki H, Takagi S, Hishiki F, Tanigawa R. Ionic liquid/polyurethane/PEDOT:PSS composites for electro-active polymer actuators. Sens Actuators B. 2014;194:59–63.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Supplementary information
Rights and permissions
About this article

Cite this article
Asai, H., Okumura, T., Sakamoto, H. et al. Effect of polymer type on the performance of a nanofiber mat actuator. Polym J 51, 523–528 (2019). https://doi.org/10.1038/s41428-018-0160-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/s41428-018-0160-5
