
Abstract
In this report, we described a new technique of gasless V-NOTES for hysterectomy and salpingectomy on a robotic platform with flexible devices in a porcine model. As a result, the gynecological procedures were successfully completed. The total operative time was 110 min, while the docking time was 10 min. The estimated blood loss was estimated to be 10 mL with no intraoperative complications. It revealed that gasless V-NOTES for hysterectomy and salpingectomy on a robotic platform with flexible devices appeared to be feasible and safe in the porcine model and has the potential for clinical use in human beings.
Similar content being viewed by others


Introduction
Laparoscopy initiated the era of minimally invasive surgery, while natural orifice transluminal endoscopic surgery (NOTES) was a further step to the field. The vagina is the most widely used natural channel1. Compared with conventional laparoscopy, transvaginal natural orifice transluminal endoscopic surgery (v-NOTES) was preferred by surgeons as it provides better access to pelvic organs, avoids the abdominal scar, even decreases the operation time and estimated blood loss2. However, many barriers still stand on its way because of limited manipulators freedom and narrow operating space. In this case, robotic laparoscopy could play to its strength as it provides accurate and fine surgical procedures3. Although traditional robotic V-NOTES was proven to be non-inferiority compared to traditional laparoscopy4,5, challenge still existed as there was significant arm collisions due to space confinement and rigid-link instrumental arms6. For this reason, robotic platform with flexible devices was developed7. Currently, there were few reports published about the application of V-NOTES for hysterectomy in the robotic platform with flexible devices. Therefore, we tried to evaluate its feasibility in the present study. As a porcine was more representative to evaluate on the surgical field and assess the workspace availability in human beings, we performed this operation in a porcine model. Furthermore, we combined gasless technique in this operation to alleviate the interference of smoke generated in the surgery. We believe that the surgical experience was valuable for its application in human beings.
Methods
One female adult pig weighed 60 kg was used in this study. It was initially administered by 1 mg Shutai per kg for anesthesia induction and 1.5–2.5% isoflurane for maintenance. The pig was placed in supine position with low head high hip (Fig. 1).

Porcine setup with the inserted cannula.
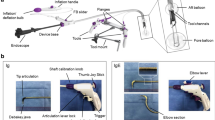
The robotic platform used in this manuscript is SHURUI system. The surgical manipulators of the SHURUI endoscopic surgical robotic system can configured for multi-port, single-port, and hybrid-port procedures (Fig. 2a). Both the surgical robotic tool and endoscopic tool in the SHURUI endoscopic surgical system are composed of so-called dual continuum mechanism. Unlike the conventional instruments that are composed of joints and rigid links, the continuum mechanism used in the SHURUI endoscopic surgical robotic system achieves its motion via continuous deformation of the elastic structure (Fig. 2b).

(a) An overview of the SHURUI endoscopic surgical robotic system. The patient-side cart can be arranged to deploy the surgical/endoscopic tools in the (1) multi-port, (2) hybrid-port, and (3) single-port configurations. (b) Dual continuum mechanism.
The surgical technique is as follows.
-
1.
The vagina and cervix were exposed with a self-made cylinder (plastic cylindrical, hollow device, 5 cm in length) after disinfection. The robotic platform with flexible devices (SHURUI, China) was established (Fig. 3a).
-
2.
The cervix was clamped and vaginal mucosa around the cervix was incised circularly to the cervical fascia (Fig. 3b).
-
3.
The cervical anterior mucosa was pulled up and the vesico-cervical fascia was separated (Fig. 3c).
-
4.
After pulling up the cervical posterior mucosa, the rectal-cervical fascia was separated subsequently (Fig. 3d).
-
5.
The cervix was pulled up, the right and the parametrial fascia was separated to expose the left uterine artery, which was electro-coagulated and disconnected (Fig. 3e). The right uterine artery was disconnected similarly.
-
6.
Bilateral para-uterine fascia and para-uterine blood vessels were separated and ligated (Fig. 3f).
-
7.
The cervix was pulled downwards, and the utero-rectal peritoneal reflection was carefully exposed and incised (Fig. 3g). After the cervix was pulled upwards, the utero-vesical peritoneal reflection was also exposed and incised (Fig. 3h).
-
8.
The uterus was pulled out (Fig. 4) and removed subsequently.

(a) Exposure of the cervix. (b) Incision of vaginal mucosa circularly. (c) Dissection of vaginal mucosa anteriorly and (d) posteriorly. (e) Ligation of bilateral uterine arteries. (f) Dissection of para-uterine tissues. (g) Incision of utero-rectal peritoneal reflection (h) and utero-vesical peritoneal reflection.

The uterus was pulled out from the vagina.
All surgical procedures in the porcine model were performed by the primary surgeon via a remote console (Sup Fig. 1). During the surgery, the smoke and blood were sucked away by the assistant to ensure a clear operative field. Video 1 and Video 2 shows the surgical procedure of separation of paracervical tissues and uterine bladder space. This study was reviewed and approved by [Ethics Committee of Chengdu Women and Children’s Central Hospital], with the approval number: [202378], and was carried out in accordance with the Guidelines for Research with Experimental Animals of the University of Electronic Science and Technology of China. This study was performed in compliance with the ARRIVE guidelines.
Results
Hysterectomy was successfully completed in the porcine model. The docking time of the robotic system was 10 min. The time required hysterectomy was approximately 110 min. The blood loss for the procedure was estimated to be 20 mL, and the porcine survived the surgery without any intraoperative complications.
Discussion
To the best of our knowledge, the study may be the first to describe the technique of gasless V-NOTES for hysterectomy and salpingectomy in the porcine model on a robot platform with flexible devices. In 2013 and 2017, Bazzi and Katagiri described a case of V-NOTES for partial nephrectomy and liver resection in a porcine model respectively8,9. However, it is not necessary to do the intricate dissection of para-cervical and para-uterine tissues in both cases. In 2021, Chan reported two cases of hysterectomy in the porcine model on a robot platform6. In this article, the surgery was performed by transrectal route, which was different from the transvaginal route in the present study. As hysterectomy was performed trans-vaginally in human beings, the surgical experience in the present study may be more applicable for human beings. Moreover, as the vaginal channel was narrower and more curved in the porcine model than human beings, it may be easier to complete surgical procedure in human beings compared with that of the porcine model.
According to our experience, the following aspects are critical to the success of this operation. 1) Proficient surgical skills are key to the surgery. The challenge of V-NOTES is the limited maneuverability. Therefore, the surgeons should have repeated training of the surgical technique, such as gripping, suture and knotting in a confined space (Fig. 5). 2) A clear surgical vision was an important guarantee. As we know, smoke generated during the surgery led to unclear surgical vision, especially when it was performed in an enclosed space. Therefore, we adopted the gasless technique which has been proven effective in our hospital5. According to our experience and previous studies, gasless technique not only decreased the complications associated with CO2 pneumoperitoneum, but also reduced the operation difficulty and cost10,11. There may be concerns about the limited exposure of surgical space in gasless surgery. However, this may be resolved with our invented suspension needle by hooking up the mesocolic band or peritoneum12. 3) The self-made device which was placed in the vagina was helpful to open the vaginal wall. We also made a similar device compatible with the vagina of human beings which has been proven effective in our clinical practice (Sup. Fig. 2).

laparoscopic surgical skills training.
Conclusion
In conclusion, gasless V-NOTES for hysterectomy and salpingectomy on the robotic platform with flexible devices in the porcine model was feasible and safe. And we believe it could be successfully applied in human beings in the near future. Of course, there are anatomic differences between porcine and human beings, further studies about its application in human beings are required.
Data availability
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
Moris, D. N. et al. Surgery via natural orifices in human beings: Yesterday, today, tomorrow. Am. J. Surg. 204(1), 93–102. https://doi.org/10.1016/j.amjsurg.2011.05.019 (2012).
Housmans, S. et al. Systematic review and meta-analysis on hysterectomy by vaginal natural orifice transluminal endoscopic surgery (vNOTES) compared to laparoscopic hysterectomy for benign indications. J. Clin. Med. 9(12), 3959. https://doi.org/10.3390/jcm9123959 (2020).
Lee, C. L. et al. Hysterectomy by transvaginal natural orifice transluminal endoscopic surgery (NOTES): A series of 137 patients. J. Minim. Invas. Gynecol. 21(5), 818–824. https://doi.org/10.1016/j.jmig.2014.03.011 (2014).
Yang, Y. S. Robotic natural orifice transluminal endoscopic surgery (NOTES) hysterectomy as a scarless and gasless surgery. Surg. Endosc. 34(1), 492–500. https://doi.org/10.1007/s00464-019-07115-z (2020).
Mei, Y. et al. The comparison of gasless and traditional robot-assisted transvaginal natural orifice transluminal endoscopic surgery in hysterectomy. Front. Med. (Lausanne) 10, 1117158. https://doi.org/10.3389/fmed.2023.1117158 (2023).
Chan, K. L. et al. Robotic natural orifice transluminal endoscopic surgery hysterectomy and Salpingo-oophorectomy in a porcine model. Surg. Innov. 29(2), 215–224. https://doi.org/10.1177/15533506211018433 (2022).
Arezzo, A. et al. Total mesorectal excision using a soft and flexible robotic arm: A feasibility study in cadaver models. Surg. Endosc. 31(1), 264–273. https://doi.org/10.1007/s00464-016-4967-x (2017).
Bazzi, W. M. et al. Comparison of transrectal and transvaginal hybrid natural orifice transluminal endoscopic surgery partial nephrectomy in the porcine model. Urology 82(1), 84–89. https://doi.org/10.1016/j.urology.2013.03.007 (2013).
Katagiri, T. et al. Feasibility and technique for transvaginal natural orifice transluminal endoscopic surgery liver resection: A porcine model. Surg. Laparosc. Endosc. Percutan. Tech. 27(1), e6–e11. https://doi.org/10.1097/sle.0000000000000367 (2017).
Mei, Y. et al. The comparison of gasless and traditional robot-assisted transvaginal natural orifice transluminal endoscopic surgery in hysterectomy. Front. Med. 10, 1117158. https://doi.org/10.3389/fmed.2023.1117158 (2023).
Ito, H. et al. Introduction of gasless laparoscopic surgery as a minimally invasive procedure for endometrial cancer and its usefulness from the viewpoint of the learning curve. World J. Surg. Oncol. 19(1), 347. https://doi.org/10.1186/s12957-021-02453-6 (2021).
Lin, Y., He, L. & Mei, Y. A new technique of laparoscopic para-aortic lymphadenectomy optimizes perioperative outcome. J. Gynecol. Oncol. 32(1), e2. https://doi.org/10.3802/jgo.2021.32.e2 (2021).
Author information
Authors and Affiliations
Contributions
Study concept and design: M.Y.W. and L.Y.H. Acquisition of data: L.Y.H., WYJ, Z.Q., L.L.X., X.L., H.Q.N., C.J.J. Analysis and interpretation of data: L.Y.H., M.Y.W., Z.Q. Drafting of the manuscript: M.Y.W., Z.Q., W.Y.J. Critical revision of the manuscript for important intellectual content: L.Y.H., M.Y.W., W.Y.J. Statistical analysis: M.Y.W. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mei, Y., Wang, Y., Zhang, Q. et al. Gasless transvaginal natural orifice transluminal endoscopic surgery for hysterectomy and salpingectomy on a robot platform with flexible devices in a porcine model. Sci Rep 14, 5366 (2024). https://doi.org/10.1038/s41598-024-55576-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-55576-7
Keywords
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
